
Induction motors are one of the greatest inventions in the history of humanity. Accounting for about 45% of the total electricity consumption worldwide, it is a ubiquitous technology in modern world machinery. In fact, the world-famous electric-automobile corporation, Tesla, has named their organization to tribute the inventor of induction motor, Nikola Tesla. An induction motor is an alternating current (AC) driven electric motor that employs electromagnetic induction to convert electrical energy into mechanical energy. It is also known as an asynchronous motor, as the rotational frequency of the motor is usually less and not in sync with the frequency of input AC. The induction motors have several advantages over equivalent DC motors, such as lower construction and maintenance cost, ease of operation, higher speed, durability, etc., which makes them more employable. To understand the working of an induction motor, let’s first understand the parts that make it an excellent machine.
Components of an Induction Motor
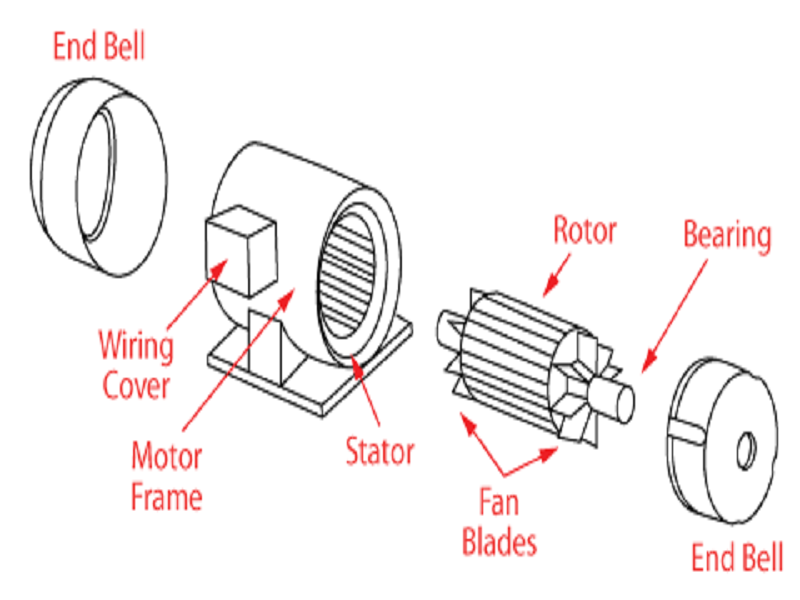
An induction motor can come in several shapes and sizes, but it is most commonly a cylindrical device with an axial shaft protruding from it. The rotatory action of the shaft is carried out by arranging the following components in a particular manner.
Stator
An induction motor’s stator is a hollow cylindrical core comprised of laminated and layered thin metal sheets. It’s the stationary part with slots for the coil of the motor’s electromagnetic circuit to wind through. The laminated structure of the stator is employed to prevent eddy current and hysteresis losses that would otherwise occur with a solid core. The coil of the stator, also known as stator winding, is made of copper wires insulated with enamel, varnish, or resins, to avoid any short circuit.
Rotor
A rotor is the rotatory part of an induction motor. It is a cylindrical unit mounted on the shaft that carries the mechanical load. There are two types of rotors used in the manufacturing of induction motors.
Squirrel Cage Rotor

A squirrel-cage rotor is one of the most widely used rotors in induction motor manufacturing because of its exceptional characteristics, such as reliability, robustness, and low manufacturing cost. It gets its name from its cylindrical cage-like structure that consists of longitudinal conductive bars, made of aluminum or copper, short-circuited with the rings formed of the same material on both ends. The rotor bars are slightly skewed to prevent them from locking against the gaps between the stator coils, ensuring a smooth and noise-free rotation. Moreover, the number of rods should not be equal to an integral multiple of the stator’s slots, as this may cause magnetic interlocking of both components.
Wound Rotor

A wound rotor, also known as a slip-ring rotor, is a cylindrical unit made of thin laminated steel sheets stacked together, and it has slots on its periphery to hold the rotatory windings. The ends of the rotatory windings are connected to three slip-rings placed around the shaft. The slip-rings are connected to variable power resistance banks via brushes, which allows the operator to change the speed of the motor by varying the resistance.
Shaft
The shaft is the long carbon-steel rod placed along the cylindrical axis of an induction motor. It is the element that provides the converted mechanical energy for end-use. The head of the shaft is connected to various mechanical loads, such as pulleys, gears, etc., whereas the back is connected to the fan inside the motor.
Bearings
The rotor shaft is held in place by bearings at either end of the motor casing. The bearings minimize the friction of the shaft connected to the casing, increasing the efficiency of the motor. The casing of the induction motor contains all of the motor components provides electrical connections and allows for ventilation of the motor parts to reduce heat buildup. The casing design often includes fins to assist with heat dissipation.
Fan
A fan in an induction motor acts as an exhaust and cools down the induction motor by dissipating heat. It is connected to the shaft that transmits the rotatory motion of the rotor to the fan.
Casing
The casing of the induction motor contains all of the motor components provides electrical connections and allows for ventilation of the motor parts to reduce heat buildup. The casing design often includes fins to assist with heat dissipation.
Working Principle of an Induction Motor
An induction motor works on the principle of electromagnetic induction. It is a phenomenon in which an emf is induced across a conductor when it is placed inside a varying magnetic field. This induced emf in the coil is given by Faraday’s Law of electromagnetic induction, which states that the electromotive force around a closed path is equal to the negative of the time rate of change of the magnetic flux enclosed by the path. Mathematically, this statement can be written as
ε=-\frac {dΦ}{dt}Where ε is the induced emf, Φ is the magnetic flux, and t denotes time.

The interaction between the two magnetic fields causes the rotor to rotate. To understand the concept in more detail, let’s look at the working of an induction motor.
Working of an Induction Motor
As the alternating current flows through the stator windings, it produces a magnetic field around the coils of the windings. The coils inside the stator are arranged in such a manner (120° apart spatially) that the magnetic field produced by them starts to rotate as a consequence of the periodically reversed direction of input AC. The rotating magnetic field induces current that flows through the sort circuited windings of the rotor. The flow of current then produces a back emf that opposes the change in the magnetic field produced by stator windings. The back emf of the rotor windings lags 90 degrees (without load) behind the emf of stator windings. This difference in force creates torque and causes the rotor to rotate around the axis of the shaft. The lag also causes the rotor windings to rotate a little bit slower than the rotating field. The difference between the speed is known as “slip” in technical terms, and it can vary depending on several factors, such as the load that the motor drives, the resistance of the rotor circuit, and the strength of the magnetic field produced by the stator. The working of an induction motor is quite similar to that of a transformer, with primary and secondary windings being stator and rotor windings, respectively. An induction motor is also known as a rotating transformer because of the rotational motion of the rotor windings. The operations and working of induction motors may vary according to their types.
Types Of Induction Motors
Induction motors are primarily classified into two categories based on the power supply they are operating, i.e., Three-phase induction motor and single-phase induction motor.
Three-Phase Induction Motor

A three-phase induction motor is one of the most commonly used induction motors for industrial and commercial purposes. As the name suggests, three-phase induction motors are the ones that work on a three-phase AC supply. To comprehend the operation of a three-phase induction motor, it is essential to understand a little bit about the three-phase AC power supply. The direction of current in an AC power supply changes periodically, generating a sinusoidal waveform with each cycle showing the magnitude of current going from zero to the maximum in one direction, back to zero, and then to the maximum in the opposite direction. A three-phase AC power supply comprises three different sinusoidal waveforms of AC such that when one of the cycles passes zero, the other two can compensate for the decreased magnitude of the current in the circuit. Most of our domestic electrical appliances can work efficiently on 50- 60 Hz (cycles per second) of a single sinusoidal waveform of an AC; however, for industrial purposes, a three-phase AC supply is applied to fulfill high power requirements.

In a three-phase induction motor, the stator consists of three sets of windings to which the input three-phase AC is supplied. The stator windings are arranged in Y configuration, forming a phase difference of 120-degree electrical angle. This arrangement provides a rotating magnetic field, and as per Lenz’s Law, the rotor starts to rotate along its direction to neutralize the effect of electromagnetic induction. Nonetheless, due to the difference between the induced rotor magnetic flux and the stator’s magnetic flux, the rotor never reaches the speed of the rotating magnetic field. Hypothetically, if the rotor manages to achieve a speed similar to that of the rotating magnetic field by applying some external force, there will be no lag between the fluxes and electromagnetic induction will instantly stop. There are mainly two
Squirrel Cage Three-phase Induction Motor

As the name suggests, a three-phase squirrel cage induction motor contains a squirrel cage rotor (discussed above) and works on the three-phase AC supply. The rotating magnetic field induces current across the conductive bars, which further generates the rotor’s magnetic flux and causes the rotor to rotate. The cylindrical cage structure has certain advantages, such as robust structure and low maintenance cost; however, the most prominent feature of squirrel cage rotors is the ease of design to create different variants. The speed-torque characteristics of a three-phase squirrel cage induction motor can be easily modified by adjusting the skewness and length of conductive bars inside the rotor. This enables motors from different manufacturers to be interchanged easily, making motor replacement more straightforward. Nevertheless, the lack of speed control in squirrel cage induction motors is a downside to their unique structure. The short-circuited rings at the ends of the rotor do not provide any room for the addition of variable resistance, and therefore, a squirrel-cage three-phase induction motor runs at a constant speed after reaching a steady state.
Slip Ring Three-phase Induction Motor

A slip ring three-phase induction motor, also known as a winding rotor three-phase induction motor, is an asynchronous motor with variable speed. The rotor of these motors is made up of a cylindrical unit, containing laminated steel plates wound with copper wire coils. The rotor’s windings are arranged in a three-phase configuration, with each phase’s terminals connected to the slip rings. A slip ring is an electromechanical device that assists the transmission of power and electrical signals from a stationary to a rotating component. When an AC source is used to excite a stator winding, magnetic flux is produced. The rotating magnetic field induces current across the conductive bars, which generates additional magnetic flux in the rotor and causes it to rotate. Nonetheless, due to more number of turns in the rotor windings, the voltage induced is high compared to the induced current. When the motor is turned on, the external resistance imposed on the rotor windings causes the rotor current to weaken the stator rotating magnetic field. This means that once the motor reaches full speed, the resistance can be adjusted to control the rotational speed, giving operators the ability to choose the starting torque and running characteristics. The inductive reactance and phase difference between I and V can be reduced, allowing the motor to provide a high starting torque. When compared to standard squirrel cage motors, the complexity and maintenance required by the slip rings and brushes are high. Nonetheless, s in applications with high inertial loads, such as large fans, pumps, and grinding mills, the wound rotor design allows for gradual acceleration of the load through speed and torque control.
Advantages of Three-phase induction motor
- They have a simple construction and a robust structure that makes them durable and easy to manage.
- The cost of maintenance for Three-phase induction motors is considerably low in comparison to single-phase induction motors.
- The most prominent feature that makes three-phase induction motors widely employable in the industry is that they are self-starting and do not require any external mechanism to start the rotation of the rotor. The rotating magnetic field produced by the Y formation of the stator windings is efficient enough to cause the starting torque, which is not the case in single-phase induction motors.
- The splitting of three-phase input AC in a three-phase induction motor causes the distribution of load and makes the motor more efficient in terms of speed-torque characteristics.
- The rotor of a squirrel cage three-phase induction motor does not have any physical electrical connection, which saves from the current loss that may occur during transmission.
- A three-phase induction motor works on a rotating magnetic field with a uniform magnitude, i.e., the torque production is consistent and not pulsating.
- The steady magnetic field also ensures less vibration of the motor.
Disadvantages of Three-phase induction motor
- The three-phase induction motor draws more current during light load conditions due to the poor power factor. As a result, there is a lot of copper leakage, and the efficiency is low.
- To acquire the speed control in a three-phase induction motor, more electrical components are required, resulting in a complex electrical mechanism.
- The induction motor has a high starting inrush current. This causes a reduction in voltage at the time of starting.
Applications
Three-phase induction motors are principally employed in industrial environments. Squirrel cage induction motors are utilized in both household and industrial applications, particularly in applications where motor speed control is not required, such as submersible pumps, rolling presses, grinders, conveyors, floor mill compressors, etc. Contrarily, slip ring motors are utilized in heavy-load applications that require a high starting torque, for example, lifts, cranes, line shafts, mill presses, etc.
Single-Phase Induction Motor

Single-phase induction motors are almost identical to three-phase induction motors; however, these motors operate on a single-phase AC supply. Single-phase induction motors are widely employed in low-power applications, such as household appliances. These are smaller in size and less costly to manufacture. Because most of these motors are built in fractional kilowatt capacity, they are also known as fractional KW motors. The stator of a single-phase induction motor is a stationary portion with a laminated construction made up of stampings, similar to that of a three-phase induction motor. The stator winding is supported by slots on the edge of these stampings. A single-phase AC source is used to activate this winding. The rotor is made up of slots filled with conductive aluminum or copper bars. The induced magnetic field in the rotor will interact with the stator magnetic field to form a revolving field. Even with a single winding, this field forces the motor to operate in the direction it was started. When the motors are connected to loads, however, it is not viable to provide beginning rotation. To circumvent this difficulty, a single-phase motor is temporarily converted to a two-phase motor to provide rotating flux. In addition to the main stator winding, a starting winding is provided. The starting or auxiliary winding is made very resistive, whereas the main or running winding is created very inductive. Because of the enormous phase difference between these two, enough torque is produced to rotate the rotor.
Split Phase Induction Motor

In a split-phase single-phase induction motor, also known as a resistance start motor, the auxiliary or starting windings are placed 90° separated from the main stator windings. The auxiliary windings, along with a resistor, are connected to the main windings in series and parallel to the AC supply. The auxiliary winding has few turns with a small diameter. The auxiliary windings create a phase difference between both fluxes produced by the main winding and rotor winding. When the motor achieves 75 to 80% of its maximum speed, a centrifugal switch turns off this winding, which is ineffective in running conditions. The motor then runs solely on the main stator winding. This approach produces a very small phase difference, and therefore, the starting torque in these motors is very low. As a result, they are employed in applications that require a modest beginning torque, such as a fan, blower, or grinder.
Capacitor Start Induction Motor

This motor is a more sophisticated variant of the Split phase induction motor. Split-phase induction is insufficient in producing high torque because the phase difference caused by auxiliary windings is small. This shortcoming is mitigated in the capacitor start motor by linking a capacitor in series with the auxiliary winding. This motor is equipped with a dry-type capacitor that runs on alternating current. Nonetheless, this capacitor is not used continually. A centrifugal switch is employed in this circuit as well, which disconnects the capacitor and auxiliary winding when the motor is running at 75-80% of synchronous speed. The capacitor draws a greater phase difference between the current flowing through the main windings and the current flowing through the auxiliary windings. As a result, as compared to a split-phase induction motor, this motor’s starting torque is extremely high, even reaching 300 percent greater than the full load capacity of the split face induction motor. This motor is utilized in applications where strong starting torque is required, such as a lathe machine, compressor, drilling machines, etc.
Capacitor Start Capacitor Run Induction Motor

A capacitor start capacitor run motor has two capacitors in a parallel configuration connected in series auxiliary winding. One of these two capacitors is used exclusively for initiation (starting capacitor) and has a high capacitance value, while the other is permanently coupled to the motor (running capacitor) and has a low capacitance value. The starting capacitor is connected in series with a centrifugal switch that goes off when the speed of the motor reaches 70% of the speed. The running capacitor improves the power factor of the motor by providing extra charge to the AC. During running conditions, both running winding and auxiliary winding are connected with the motor. The starting torque and efficiency of this motor are very high. Therefore, this can be used in the application where high starting torque is required like a refrigerator, air conditioner, ceiling fan, compressor, etc.
Shaded Pole Induction Motor

The shaded pole induction motor is a self-starting single-phase induction motor with a copper ring shading the poles of the stator. This copper ring serves as the motor’s secondary winding and when power is supplied to the stator, flux is induced in the copper rings. The flux of the copper ring interacts with the flux of the stator windings to produce a rotating magnetic field. The shaded pole induction motor is made of a squirrel cage rotor, which interacts with the rotating magnetic field. This interaction produces the torque in the rotor and rotates it. It is essential to note that the shaded pole induction motor can rotate in one direction only. These motors do not have a very good power factor and are mostly used as relays in devices such as fans, hairdryers, projectors, record players, etc.
Advantages of Single phase Induction Motors
The fundamental advantage of the single-phase induction motor is that it is simple to assemble and construct. The induction motor’s operation is independent of the state of the environment. As a result, the motor is powerful and mechanically durable.
Disadvantages of Single Phase Induction Motors
While single-phase motors are mechanically simple, they’ve been known to run slowly or overheat if the load is high. Moreover, since single-phase motors are not self-starting, they require additional circuitry for initiation, which in turn gives more room for short circuits and failure.